
Publications
Integer-Grid Maps for Reliable Quad Meshing
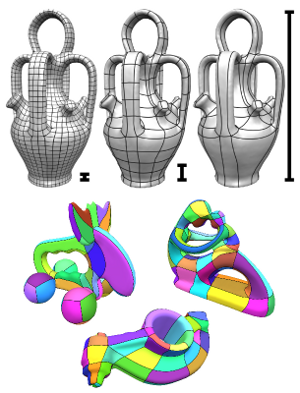
Quadrilateral remeshing approaches based on global parametrization enable many desirable mesh properties. Two of the most important ones are (1) high regularity due to explicit control over irregular vertices and (2) smooth distribution of distortion achieved by convex variational formulations. Apart from these strengths, state-of-the-art techniques suffer from limited reliability on real-world input data, i.e. the determined map might have degeneracies like (local) non-injectivities and consequently often cannot be used directly to generate a quadrilateral mesh. In this paper we propose a novel convex Mixed-Integer Quadratic Programming (MIQP) formulation which ensures by construction that the resulting map is within the class of so called Integer-Grid Maps that are guaranteed to imply a quad mesh. In order to overcome the NP-hardness of MIQP and to be able to remesh typical input geometries in acceptable time we propose two additional problem specific optimizations: a complexity reduction algorithm and singularity separating conditions. While the former decouples the dimension of the MIQP search space from the input complexity of the triangle mesh and thus is able to dramatically speed up the computation without inducing inaccuracies, the latter improves the continuous relaxation, which is crucial for the success of modern MIQP optimizers. Our experiments show that the reliability of the resulting algorithm does not only annihilate the main drawback of parametrization based quad-remeshing but moreover enables the global search for high-quality coarse quad layouts – a difficult task solely tackled by greedy methodologies before.
QEx: Robust Quad Mesh Extraction
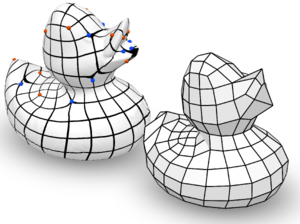
The most popular and actively researched class of quad remeshing techniques is
the family of parametrization based quad meshing methods. They all strive
to generate an integer-grid map, i.e. a parametrization of the input surface
into R2 such that the canonical grid of integer iso-lines forms a
quad mesh when mapped back onto the surface in R3. An essential,
albeit broadly neglected aspect of these methods is the quad extraction
step, i.e. the materialization of an actual quad mesh from the mere “quad
texture”. Quad (mesh) extraction is often believed to be a trivial matter but
quite the opposite is true: Numerous special cases, ambiguities induced by
numerical inaccuracies and limited solver precision, as well as imperfections
in the maps produced by most methods (unless costly countermeasures are taken)
pose significant challenges to the quad extractor. We present a method to
sanitize a provided parametrization such that it becomes numerically
consistent even in a limited precision floating point representation. Based
on this we are able to provide a comprehensive and sound description of how to
perform quad extraction robustly and without the need for any complex
tolerance thresholds or disambiguation rules. On top of that we develop a
novel strategy to cope with common local fold-overs in the parametrization.
This allows our method, dubbed QEx, to generate all-quadrilateral meshes
where otherwise holes, non-quad polygons or no output at all would have been
produced. We thus enable the practical use of an entire class of maps that was
previously considered defective. Since state of the art quad meshing methods
spend a significant share of their run time solely to prevent local
fold-overs, using our method it is now possible to obtain quad meshes
significantly quicker than before. We also provide libQEx, an open source
C++ reference implementation of our method and thus significantly lower the
bar to enter the field of quad meshing.
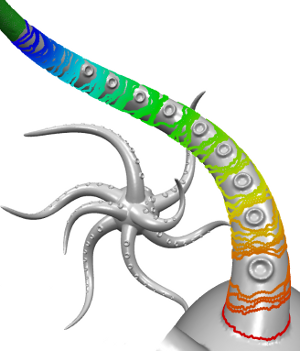
Efficient Computation of Shortest Path-Concavity for 3D Meshes
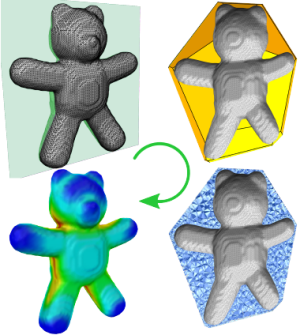
In the context of shape segmentation and retrieval object-wide distributions of measures are needed to accurately evaluate and compare local regions of shapes. Lien et al. proposed two point-wise concavity measures in the context of Approximate Convex Decompositions of polygons measuring the distance from a point to the polygon’s convex hull: an accurate Shortest Path-Concavity (SPC) measure and a Straight Line-Concavity (SLC) approximation of the same. While both are practicable on 2D shapes, the exponential costs of SPC in 3D makes it inhibitively expensive for a generalization to meshes. In this paper we propose an efficient and straight forward approximation of the Shortest Path-Concavity measure to 3D meshes. Our approximation is based on discretizing the space between mesh and convex hull, thereby reducing the continuous Shortest Path search to an efficiently solvable graph problem. Our approach works out-of-the-box on complex mesh topologies and requires no complicated handling of genus. Besides presenting a rigorous evaluation of our method on a variety of input meshes, we also define an SPC-based Shape Descriptor and show its superior retrieval and runtime performance compared with the recently presented results on the Convexity Distribution by Lian et al.
Polygon Mesh Repairing: An Application Perspective
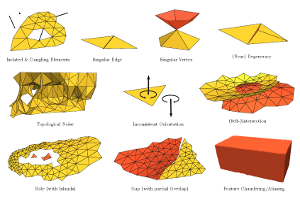
Nowadays, digital 3D models are in widespread and ubiquitous use, and each specific application dealing with 3D geometry has its own quality requirements that restrict the class of acceptable and supported models. This article analyzes typical defects that make a 3D model unsuitable for key application contexts, and surveys existing algorithms that process, repair, and improve its structure, geometry, and topology to make it appropriate to case-by-case requirements. The analysis is focused on polygon meshes, which constitute by far the most common 3D object representation. In particular, this article provides a structured overview of mesh repairing techniques from the point of view of the application context. Di fferent types of mesh defects are classified according to the upstream application that produced the mesh, whereas mesh quality requirements are grouped by representative sets of downstream applications where the mesh is to be used. The numerous mesh repair methods that have been proposed during the last two decades are analyzed and classified in terms of their capabilities, properties, and guarantees. Based on these classifications, guidelines can be derived to support the identification of repairing algorithms best-suited to bridge the compatibility gap between the quality provided by the upstream process and the quality required by the downstream applications in a given geometry processing scenario.
View-Dependent Realtime Rendering of Procedural Facades with High Geometric Detail
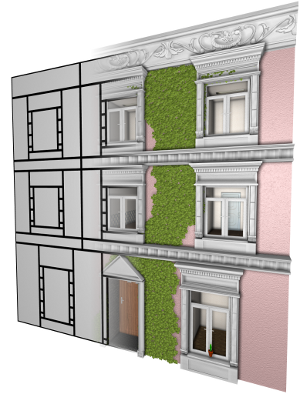
We present an algorithm for realtime rendering of large-scale city models with procedurally generated facades. By using highly detailed assets like windows, doors, and decoration such city models can provide an extremely high geometric level of detail but on the downside they also consist of billions of polygons which makes it infeasible to even store them as explicit polygonal meshes. Moreover, when rendering urban scenes usually only a very small fraction of the city is actually visible which calls for effective culling mechanisms. For procedural textures there are efficient screen space techniques that evaluate, e.g., a split grammar on a per-pixel basis in the fragment shader and thus render a textured facade in a view dependent manner. We take this idea further by introducing 3D geometric detail in addition to flat textures. Our approach is a two-pass procedure that first renders a flat procedural facade. During rasterization the fragment shader triggers the instantiation of a detailed asset whenever a geometric facade element is potentially visible. The set of instantiated detail models are then rendered in a second pass. The major challenges arise from the fact that geometric details belonging to a facade can be visible even if the base polygon of the facade itself is not visible. Hence we propose measures to conservatively estimate visibility without introducing excessive redundancy. We further extend our technique by a simple level of detail mechanism that switches to baked textures (of the assets) depending on the distance to the camera. We demonstrate that our technique achieves realtime frame rates for large-scale city models with massive detail on current commodity graphics hardware.
Practical Anisotropic Geodesy

The computation of intrinsic, geodesic distances and geodesic paths on surfaces is a fundamental low-level building block in countless Computer Graphics and Geometry Processing applications. This demand led to the development of numerous algorithms – some for the exact, others for the approximative computation, some focussing on speed, others providing strict guarantees. Most of these methods are designed for computing distances according to the standard Riemannian metric induced by the surface’s embedding in Euclidean space. Generalization to other, especially anisotropic, metrics – which more recently gained interest in several application areas – is not rarely hampered by fundamental problems. We explore and discuss possibilities for the generalization and extension of well-known methods to the anisotropic case, evaluate their relative performance in terms of accuracy and speed, and propose a novel algorithm, the Short-Term Vector Dijkstra. This algorithm is strikingly simple to implement and proves to provide practical accuracy at a higher speed than generalized previous methods.
SIFT-Realistic Rendering

3D localization approaches establish correspondences between points in a query image and a 3D point cloud reconstruction of the environment. Traditionally, the database models are created from photographs using Structure-from-Motion (SfM) techniques, which requires large collections of densely sampled images. In this paper, we address the question how point cloud data from terrestrial laser scanners can be used instead to significantly reduce the data collection effort and enable more scalable localization.
The key change here is that, in contrast to SfM points, laser-scanned 3D points are not automatically associated with local image features that could be matched to query image features. In order to make this data usable for image-based localization, we explore how point cloud rendering techniques can be leveraged to create virtual views from which database features can be extracted that match real image-based features as closely as possible. We propose different rendering techniques for this task, experimentally quantify how they affect feature repeatability, and demonstrate their benefit for image-based localization.
A Scalable Collaborative Online System for City Reconstruction

Recent advances in Structure-from-Motion and Bundle Adjustment allow us to efficiently reconstruct large 3D scenes from millions of images. However, acquiring the imagery necessary to reconstruct a whole city and not only its landmark buildings still poses a tremendous problem. In this paper, we therefore present an online system for collaborative city reconstruction that is based on crowdsourcing the image acquisition. Employing publicly available building footprints to reconstruct individual blocks rather than the whole city at once enables our system to easily scale to large urban environments. In order to map all partial reconstructions into a single coordinate frame, we develop a robust alignment scheme that registers the individual point clouds to their corresponding footprints based on GPS coordinates. Our approach can handle noise and outliers in the GPS positions and allows us to detect wrong alignments caused by the typical issues in the context of crowdsourcing applications such as malicious or improper image uploads. Furthermore, we present an efficient rendering method to obtain dense and textured views of the resulting point clouds without requiring costly multi-view stereo methods
@inproceedings{untzelmann2013iccv,
author = "Untzelmann, Ole and Sattler, Torsten and Middelberg, Sven and Kobbelt, Leif",
title = "{A Scalable Collaborative Online System for City Reconstruction}",
booktitle = "{The IEEE International Conference on Computer Vision (ICCV) Workshops}",
year = {2013}
}
Evaluation of a Mobile Projector based Indoor Navigation Interface
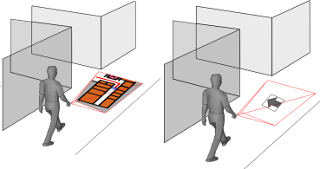
In recent years, the interest and potential applications of pedestrian indoor navigation solutions have significantly increased. Whereas the majority of mobile indoor navigation aid solutions visualize navigational information on mobile screens, the present study investigates the effectiveness of a mobile projector as navigation aid which directly projects navigational information into the environment. A benchmark evaluation of the mobile projector-based indoor navigation interface was carried out investigating a combination of different navigation devices (mobile projector vs. mobile screen) and navigation information (map vs. arrow) as well as the impact of users' spatial abilities. Results showed a superiority of the mobile screen as navigation aid and the map as navigation information type. Especially users with low spatial abilities benefited from this combination in their navigation performance and acceptance. Potential application scenarios and design implications for novel indoor navigation interfaces are derived from our findings.
Advanced Automatic Hexahedral Mesh Generation from Surface Quad Meshes
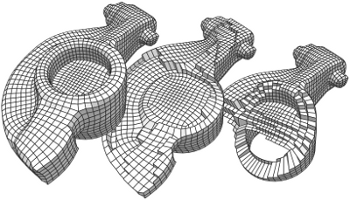
A purely topological approach for the generation of hexahedral meshes from quadrilateral surface meshes of genus zero has been proposed by M. Müller-Hannemann: in a first stage, the input surface mesh is reduced to a single hexahedron by successively eliminating loops from the dual graph of the quad mesh; in the second stage, the hexahedral mesh is constructed by extruding a layer of hexahedra for each dual loop from the first stage in reverse elimination order. In this paper, we introduce several techniques to extend the scope of target shapes of the approach and significantly improve the quality of the generated hexahedral meshes. While the original method can only handle "almost convex" objects and requires mesh surgery and remeshing in case of concave geometry, we propose a method to overcome this issue by introducing the notion of concave dual loops. Furthermore, we analyze and improve the heuristic to determine the elimination order for the dual loops such that the inordinate introduction of interior singular edges, i.e. edges of degree other than four in the hexahedral mesh, can be avoided in many cases.
Geometry Seam Carving
We present a novel approach to feature-aware mesh deformation. Previous mesh editing methods are based on an elastic deformation model and thus tend to uniformly distribute the distortion in a least squares sense over the entire deformation region. Recent results from image resizing, however, show that discrete local modifications like deleting or adding connected seams of image pixels in regions with low saliency lead to far superior preservation of local features compared to uniform scaling -- the image retargeting analogon to least squares mesh deformation. Hence, we propose a discrete mesh editing scheme that combines elastic as well as plastic deformation (in regions with little geometric detail) by transferring the concept of seam carving from image retargeting to the mesh deformation scenario. A geometry seam consists of a connected strip of triangles within the mesh's deformation region. By collapsing or splitting the interior edges of this strip we perform a deletion or insertion operation that is equivalent to image seam carving and can be interpreted as a local plastic deformation. We use a feature measure to rate the geometric saliency of each triangle in the mesh and a well-adjusted distortion measure to determine where the current mesh distortion asks for plastic deformations, i.e., for deletion or insertion of geometry seams. Precomputing a fixed set of low-saliency seams in the deformation region allows us to perform fast seam deletion and insertion operations in a predetermined order such that the local mesh modifications are properly restored when a mesh editing operation is (partially) undone. Geometry seam carving hence enables the deformation of a given mesh in a way that causes stronger distortion in homogeneous mesh regions while salient features are preserved much better.
ProFi: Design and Evaluation of a Product Finder in a Supermarket Scenario

This paper presents the design and evaluation of ProFi, a PROduct FInding assistant in a supermarket scenario. We explore the idea of micro-navigation in supermarkets and aim at enhancing visual search processes in front of a shelf. In order to assess the concept, a prototype is built combining visual recognition techniques with an Augmented Reality interface. Two AR patterns (circle and spotlight) are designed to highlight target products. The prototype is formally evaluated in a controlled environment. Quantitative and qualitative data is collected to evaluate the usability and user preference. The results show that ProFi significantly improves the users’ product finding performance, especially when using the circle, and that ProFi is well accepted by users.
Physically Based Rendering of the Martian Atmosphere
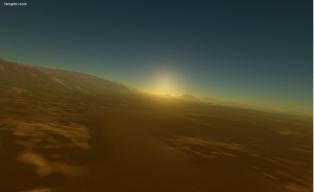
With the introduction of complex precomputed scattering tables by Bruneton in 2008, the quality of visualizing atmospheric scattering vastly improved. The presented algorithms allowed for the rendering of complex atmospheric features such as multiple-scattering or light shafts in real-time and at interactive framerates. While their published implementation corresponding to the publication was merely a proof of concept, we present a more practical approach by applying their scattering theory to an already existing planetary rendering engine. Because the commonly used set of parameters only describes the atmosphere of the Earth, we further extend the scattering formulation to visualize the atmosphere of the planet Mars. Validating the modified scattering and resulting parameters is then done by comparison with available imagery from the Martian atmosphere
OpenFlipper - A Highly Modular Framework for Processing and Visualization of Complex Geometric Models

OpenFlipper is an open-source framework for processing and visualization of complex geometric models suitable for software development in both research and commercial applications. In this paper we describe in detail the software architecture which is designed in order to provide a high degree of modularity and adaptability for various purposes. Although OpenFlipper originates in the field of geometry processing, many emerging applications in this domain increasingly rely on immersion technologies. Consequently, the presented software is, unlike most existing VR software frameworks, mainly intended to be used for the content creation and processing of virtual environments while directly providing a variety of immersion techniques. By keeping OpenFlipper’s core as simple as possible and implementing functional components as plugins, the framework’s structure allows for easy extensions, replacements, and bundling. We particularly focus on the description of the integrated rendering pipeline that addresses the requirements of flexible, modern high-end graphics applications. Furthermore we describe how cross-platform unit and smoke testing as well as continuous integration is implemented in order to guarantee that new code revisions remain portable and regression is minimized. OpenFlipper is licensed under the Lesser GNU Public License and available, up to this state, for Linux, Windows, and Mac OSX.
Previous Year (2012)
